It was a while since I thought or did anything about it, but as a stroke of luck I got off eBay a pair of QX3 drones and a new-in-box ST10+ station. I remembered I never finished this, so I did and it worked. Here are my notes though:
1. The wiring in H. Elsner's table is a bit off. Here is the wiring that worked for me:
(#Pin) QX3 Main Board wire <-> SR24 Receiver wire:
(#1) Yellow <-> Black (Ground)
(#2) Orange <-> White (Vcc)
(#3) Red <-> Gray
(#4) Brown <-> Yellow
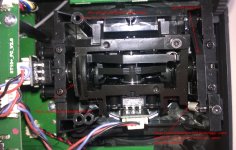
2. As said by Elsner, the connectors don't match. I ended up soldering a new cable with a JST SH 1.0 connector that matches the QX3 board. These are the most common cables used in FPV drones. This requires cutting the clear shrink-wrap.
3. I ended up leaving the Spektrum receiver and adding the SR24 as well. Since the shrink-wrap was off, I took the long antenna off from the IPEX U.FL board connector, put it through the same hole where the Spektrum antenna goes out to the landing skid, reconnected it to the board and wrapped the receiver in clear thermal tape (the one used for LiPo battery packs). The cable is the same diameter length as the Spektrum antenna so they go along the same clips verry well. Since they can't both be turned on at the same time interference between the antennas is not an issue.
4. I left the Spektrum receiver on purpose: With the ST10+ I couldn't (so far at least) trigger all the flight modes. The QX3 latest firmware has 5 modes, including a fan-made "Stagility" one that will let you flip the quad. Good luck doing that with the Yuneec ST10+ radio. So when I feel like it I reconnect the Spektrum receiver, disconnect the gimbal camera, put a old CGO1 and do some Line-Of-Sight flying for the old time's sake.
5. I can't connect the CGO1 cam to the ST10+ station. It does connect and show video for ~1 sec and then goes into a boot loop. Any help will be greatly appreciated
6. Binding was a disaster. Until I figured out the 2 data wires were swapped, I couldn't force the SR24 to bind (understandably). I ended up opening a Blade Chroma drone, putting this receiver to bind and then moving it back to the 350 QX3. When it did not bind there I figured the wiring was bad, fixed it and it worked as a charm. This however prevented me from figuring out how to use the QX3 or the super-old QX to bind. I assume the same bind procedure (holding it upside down at start for 5 sec) would have worked.
Anyway, huuuuge thanks to H. Elstner for the idea and ..... I need to figure out how to read the SD Card data
")
If anyone can help with that - would appreciate it!